2016/07/29 UPDATE
2016/07/29 UPDATE

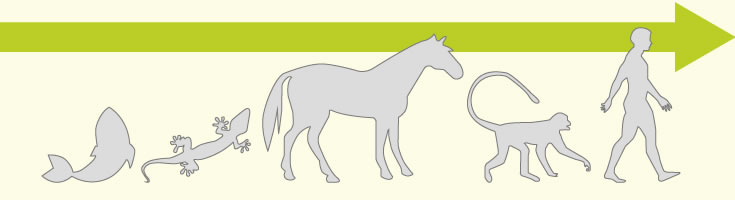
個体発生は系統発生を繰り返すと言いますが、人間も生まれる以前から歩く準備を始めます。動物が海から陸に上がったのは約3億年前と言われています。それまでは、ミジンコから魚まで、水の中では浮力のお陰で、無重力の世界で暮らしていました。重力に逆らって体重を支える必要が無いのですから、繊毛から鰭まで、水をかきさえすれば簡単に移動できました。 子宮の中は海中と同じですから、生まれるまでは何の不自由もありません。しかし、誕生、直後には立って歩くどころか、寝返りさえも出来ません。それに比べて野生の馬は、直ぐに立ち上がり母親を追いかけるのですから、四つ脚だからと言っても大した物です。人間ではハイハイが当たるのでしょうが、寝返りからお座りと、手足の筋肉だけでなく、体幹の筋肉の発達も必要なので、半年以上掛かります。でも、両生類のようなズリハイから、は虫類のハイハイ、ほ乳類の高ハイと、陸に上がって以来の3億年の進化を、一年以内に達成すると思えば、たいした物です。

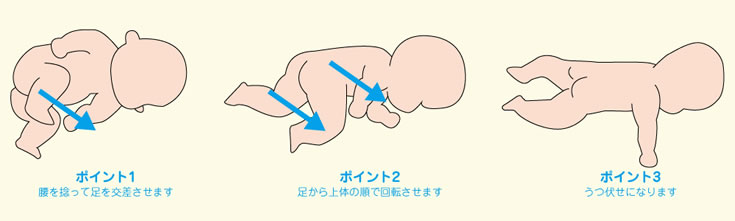
人間の重力との戦いは、寝返りから始まります。仰向けに寝た状態からうつ伏せになる為には、まず横にならなければなりません。しかし、横に向こうとすると、重心の位置は接地面から外れるので、元に戻る方向に回転ベクトルが生じる上に、重心の位置そのものを持ち上げなければなりません。これを、体を捻る運動で行うわけですが、重心が最高地点を越えて、うつ伏せの方向に回転ベクトルが変化するまで、支持点となる下半身か上半身を接地し続けなければなりません。体幹を90度以上捻り、回転が始まれば、それに合わせて体幹の捻じれを戻していき、先行した半身が接地する前に最高点を越えると言う、複雑な運動をこなしているのです。でもこれが出来れば、ゴロゴロと人生初めての移動が可能となります。

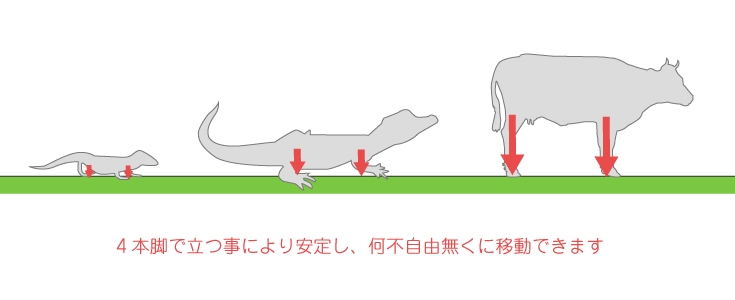
次がハイハイですが、寝返りで鍛えた体幹の筋肉に加えて四肢の筋肉が重要になります。赤ちゃんには色々な原始的反射があり、手足をツッパたり握ったりする運動を自然に覚えますが、重力に抗して身体を持ち上げるほどの筋力をつけるには、時間が掛かります。始めは、やっと陸地に上がった山椒魚の様に、体重は身体で支えて手足で床を押て進もうとしますが、直ぐに手足で身体を持ち上げ進む様になります。多くの動物の様に4本脚で立つのですから安定性は良く、四肢の筋力も十分で何不自由無く移動できます。何故、2本脚で立って歩こうとするのか不思議なくらいです。

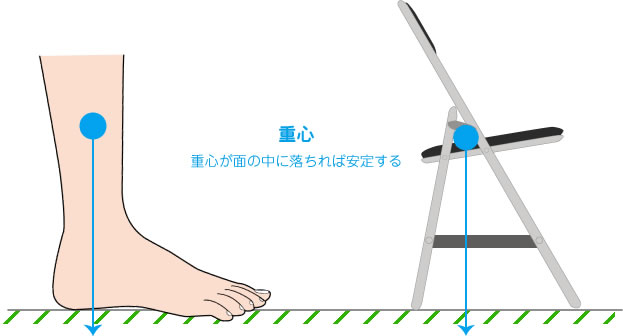
次には、つかまり立ちのお猿の時代を経て、人間として直立二足歩行を開始しますが、四足動物としての三億年、人間としての六百万年の歴史を繰り返すのですから、一年以上掛かるのもやむを得ません。 ハイハイをしている間は、前肢と後肢ですから、後脚が足になるのは立っちからです。最初に必要となるのは、静的安定性です。動物であれ椅子であれ、重心が脚で囲まれる面の中に落ちなければ、安定して立っていることは出来ません。ユークリッドの幾何学で習ったように、面は三点が無ければならないので、四本脚の動物や三本脚の椅子は立っていられますが、2本脚の人間は立てないことになります。でも、ちゃんと立てているのは、人間の足が椅子や馬と違ってL字型をしているからです。人間だけでなく猿やカンガルーや鳥も足がL字型をしているので、2本脚は2点ではなく2本線になるので面が形成され安定して立つことが出来るのです。しかし、2本脚で立つためには、重心がつま先から踵の間に落ちる様に、足関節が一定角度内にコントロールされなければなりません。金属製のL字型パイプの脚なら椅子も倒れませんが、ゴム製のパイプなら倒れてしまいます。 これで面が形成されれば、後は重心がその面の中に落ちれば静的安定性が得られ立つことが出来ます。椅子のように形を変えないものであれば、重心の位置は変わらないので、一度立てれば立ち続けることが出来ます。しかし、人間には足関節、膝、股関節、脊柱と多くの関節があり、それを多くの筋肉が支えているので、形態は刻々変化し、重心の位置も前後、左右、上下と移動します。ですから、足の位置が決まって面が規定されても、重心がその面から外に落ちれば立ってはいられません。立っているという動作は、重心の位置を脚が形成した面の範囲内に落ちるように、体全体を制御する複雑な神経・骨・筋肉系の総合機能なのです。

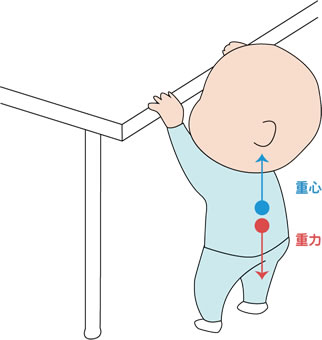
この頃の赤ちゃんを観察していると、盛んに上のものに興味を持ち、のぞっこんだり引っ張り下ろそうとします。親の目線が高いからか、木登りしていた祖先を思い出す為か分かりませんが、直立二足歩行に向けて立っちを始めます。最初は二本足で規定される面に安定して重心を落とす事が出来ません。でも、何かに掴まる事によって、体重を持ち上げるのを手伝うと共に、体を支えるもう一点確保し、重心が落ちる面積を広げる事によって立ち上がります。 ここまで来れば、立っちまでもう一歩です。掴まり立ちの段階では、足は2点あれば良いので点として働き、線である必要はありません。しかし、壁から手を離して立っちする為には、両足だけで面を確保し、その中に重心が落ちる様に体をコントロールしなければ成りません。その為には、下腿三頭筋でアキレス腱を引張て足関節を固定し、大腿四頭筋で膝、臀筋で股関節、背筋で脊柱を固定して重心の位置を決めなければなりません。もちろん、それだけの事で済む訳ではありませんが、掴まり立ちが兎に角、重力に抗して重心を持ち上げて維持すれば良かったのに比べて、格段に複雑な運動を強いられる事になります。 立っちは直立二足歩行に向けての出発点と言えます。この時、足に一番大切なのは、外界との接点としての足底の感覚と形態です。前述した様に立っちにはとても複雑な制御機構が必要で、それを可能にするのはフィードバック機能の発達ですから、入力としての足底の感覚と出力としての足の形態が重要です。ですから、摑まり立ちを始める頃の乳幼児に必要な履物は、足底の感覚と形態の自由を妨げない物です。この時期に履物が必要かどうかも疑問ですが、履かせるなら足底が薄く柔らかな靴が良いでしょう。
![おすすめ商品[Greenbox オンラインショップ]](/green/image/trouble/related_ttl.png)
-


mizuno(ミズノ) LD40 III(LD403) 5KF-35009 ブラック
販売価格 15,120円(税込)
-

mizuno(ミズノ) WAVE PROMENADE TT(ウェーブプロムナードTT)
5KO-32155 ブラウン/ダークブラウン販売価格 7,452円(税込)
-


mizuno(ミズノ) LD40 III(LD403)
5KF-34058 ダークブラウン販売価格 15,120円(税込)
-

mizuno(ミズノ) WAVE PROMENADE TT(ウェーブプロムナードTT)
5KO-32105 グレー/ブラック販売価格 7,452円 (税込)



日本靴医学会、日本足の外科学会 名誉会員
昭和45年:慶應義塾大学医学部卒業、整形外科医
平成11年:第13回日本靴医学会会長、第24回日本足の外科学会会長
平成11年:第20回国際足の外科学会副会長
平成20年まで:慶應義塾大学医学部総合医科学研究センター・整形外科 教授
平成23年まで:日本靴医学会 理事長、日本足の外科学会 理事
研究分野:足の外科、外反母趾
主な著書:外反母趾を防ぐ・治す(講談社)、足のクリニック(南江堂)
主なテレビ出演:今日の健康(NHK2002/7/8、2006/3/1)、世界一受けたい授業
(日本テレビ2007/8/25)など
第35回 「骨々貯筋」、二十歳過ぎたら、骨粗鬆症の予防のために、歩き始めましょう
2018.08.31第28回 お問い合わせ頂く内容について 井口(いのくち)先生がお答えします
2017.04.05第13回 幼児におきやすい足の病気と対策(歩き始め~幼稚園)
2015.02.23